AQS抽象队列同步器!
AQS抽象队列同步器!
月伴飞鱼
AQS定义了一套多线程访问共享资源的同步模板。
- 解决了实现同步器时涉及的大量细节问题,能够极大地减少实现工作。
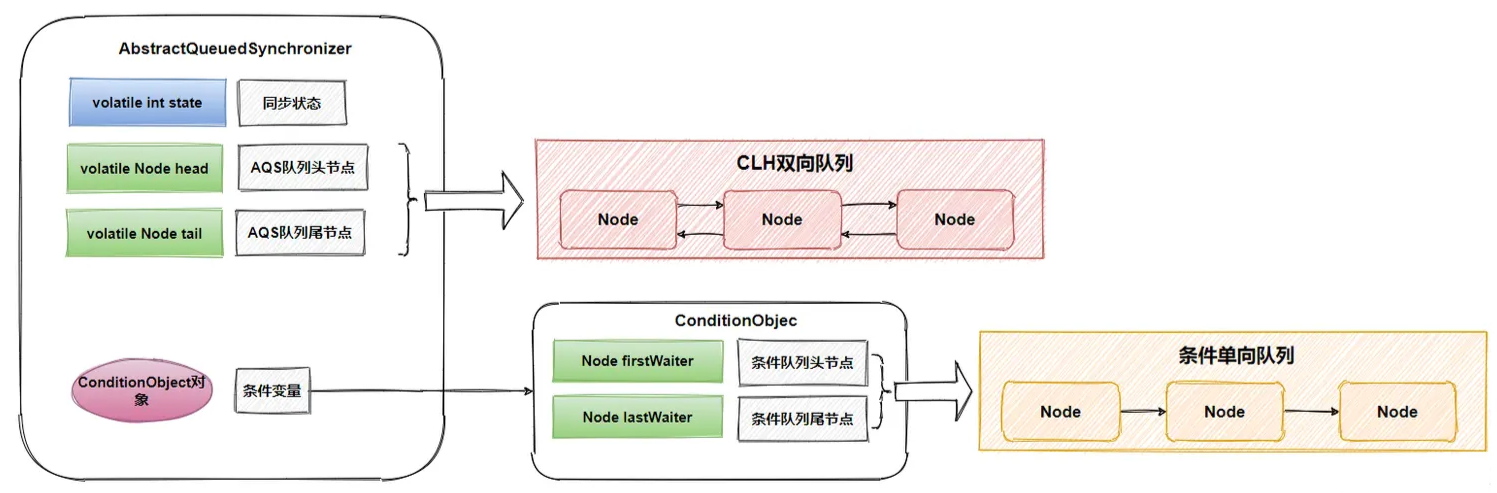
三部分组成:
state同步状态、Node组成的CLH队列、ConditionObject条件变量。
- 包含
Node组成的条件单向队列。
整体流程
使用 AQS 写一个线程协作工具类
1、新建一个线程协作工具类,在内部写一个
Sync类。
- 该
Sync类继承AbstractQueuedSynchronizer,即 AQS。2、在
Sync类里,根据是否是独占,来重写对应的方法。
- 如果是独占,则重写
tryAcquire和tryRelease等方法。- 如果是非独占,则重写
tryAcquireShared和tryReleaseShared等方法。3、在自己的线程协作工具类中,实现获取/释放的相关方法,并在里面调用
AQS对应的方法。
- 如果是独占则调用
acquire或release等方法。- 非独占则调用
acquireShared或releaseShared或acquireSharedInterruptibly等方法。
同步状态
在
AQS中维护了一个同步状态变量state,获取、释放资源是否成功都是由state决定的。
比如
state>0代表可获取资源,否则无法获取。
state的具体语义由实现者去定义。
ReentrantLock、ReentrantReadWriteLock、Semaphore、CountDownLatch定义的state语义都不一样:
ReentrantLock的state用来表示是否有锁资源。
ReentrantReadWriteLock的state高16位代表读锁状态,低16位代表写锁状态。
Semaphore的state用来表示可用信号的个数。
CountDownLatch的state用来表示计数器的值。
CLH队列
CLH是AQS内部维护的FIFO(先进先出)双端双向队列(方便尾部节点插入)。
- 基于链表数据结构。
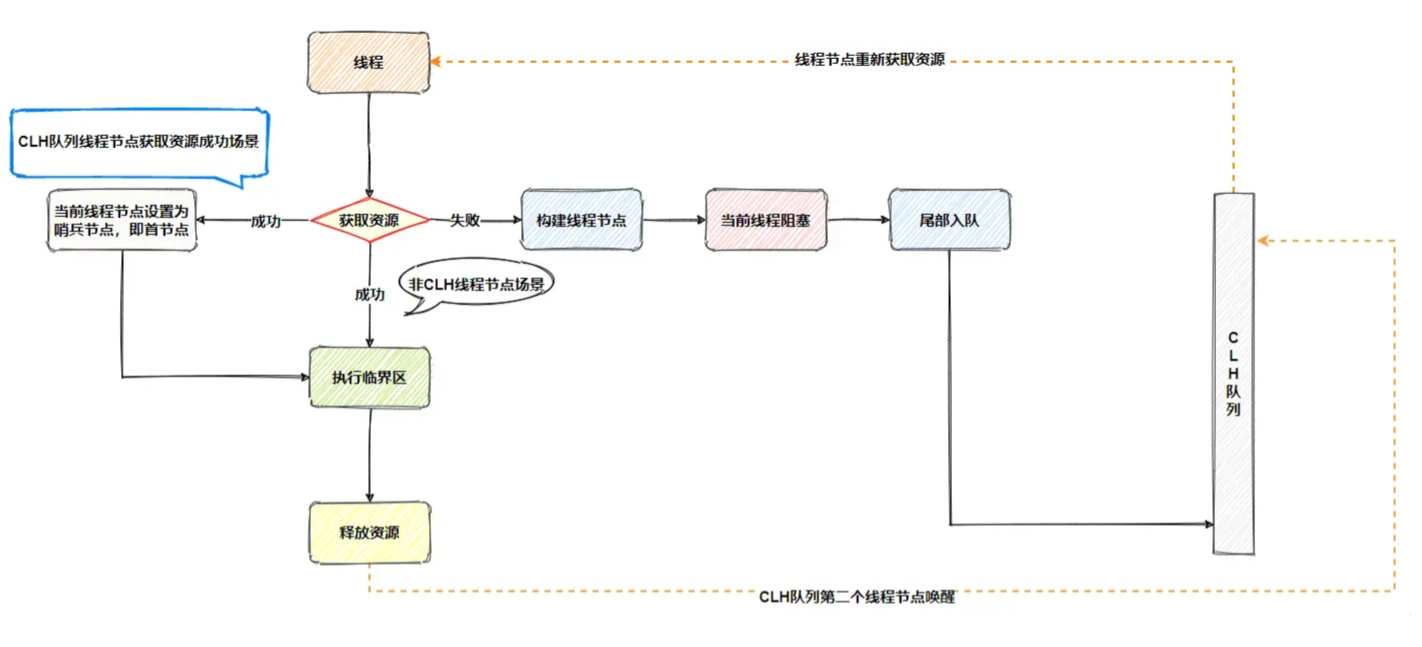
当一个线程竞争资源失败,就会将等待资源的线程封装成一个
Node节点。通过
CAS原子操作插入队列尾部,最终不同的Node节点连接组成了一个CLH队列:
- 先进先出保证了公平性。
- 非阻塞的队列,通过自旋锁和
CAS保证节点插入和移除的原子性,实现无锁快速插入。- 采用了自旋锁思想,所以
CLH也是一种基于链表的可扩展、高性能、公平的自旋锁。
Node内部类
Node是AQS的内部类:
- 每个等待资源的线程都会封装成
Node节点组成CLH队列、等待队列。线程获取资源失败,封装成
Node节点从CLH队列尾部入队并阻塞线程。
- 某线程释放资源时会把
CLH队列首部Node节点关联的线程唤醒,再次获取资源。

在
AQS中提供addWaiter函数完成Node节点的创建与入队。
1 | private Node addWaiter(Node mode) { |
添加节点的时候,如果从
CLH队列已经存在,通过CAS快速将当前节点添加到队列尾部。如果添加失败或队列不存在,则指向
enq函数自旋入队。
- 通过自旋
CAS尝试往队列尾部插入节点,直到成功。- 自旋过程如果发现
CLH队列不存在时会初始化CLH队列。
1 | private Node enq(final Node node) { |
条件变量
Object的wait、notify函数是配合Synchronized锁实现线程间同步协作的功能。
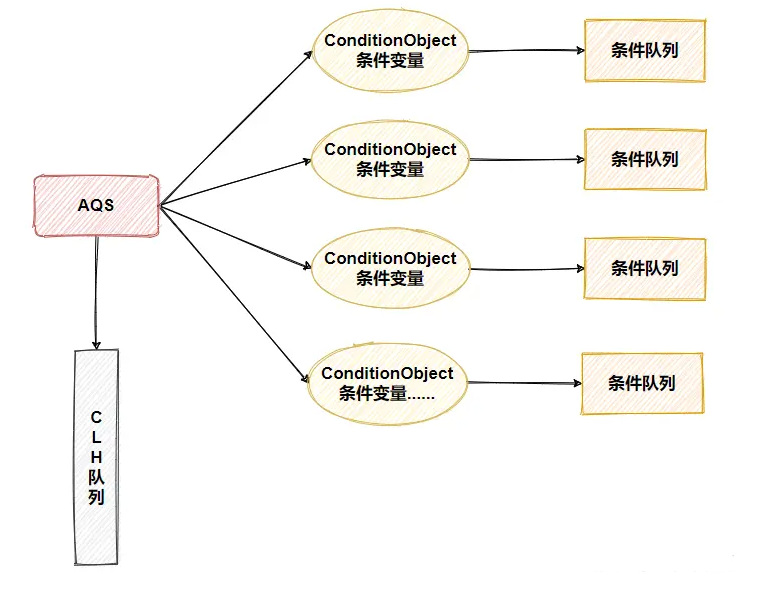
AQS的ConditionObject条件变量,则通过ConditionObject的await和signal两类函数完成。
- 不同于
Synchronized锁,一个AQS可以对应多个条件变量,而Synchronized只有一个。
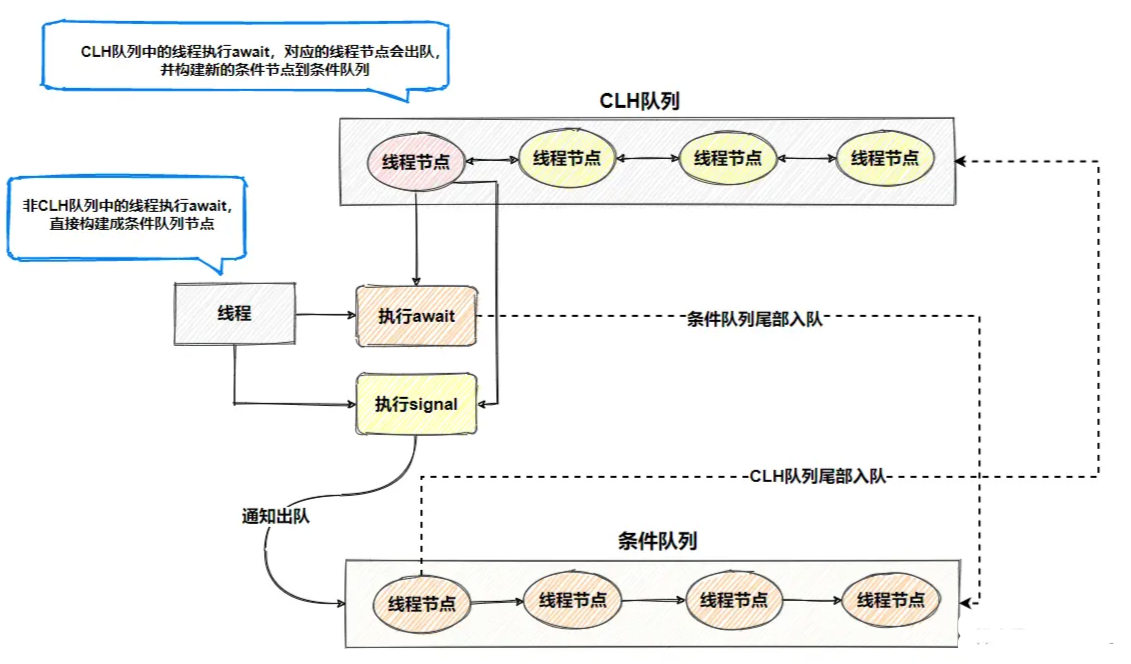
ConditionObject内部维护着一个单向条件队列,不同于CLH队列。条件队列只入队执行
await的线程节点,并且加入条件队列的节点。
- 不能在
CLH队列, 条件队列出队的节点,会入队到CLH队列。当某个线程执行了
ConditionObject的await函数,阻塞当前线程。线程会被封装成
Node节点添加到条件队列的末端,其他线程执行ConditionObject的signal函数。
- 会将条件队列头部线程节点转移到
CLH队列参与竞争资源。
AQS采用了模板方法设计模式,提供了两类模板:
- 一类是独占式模板,另一类是共享形模式。
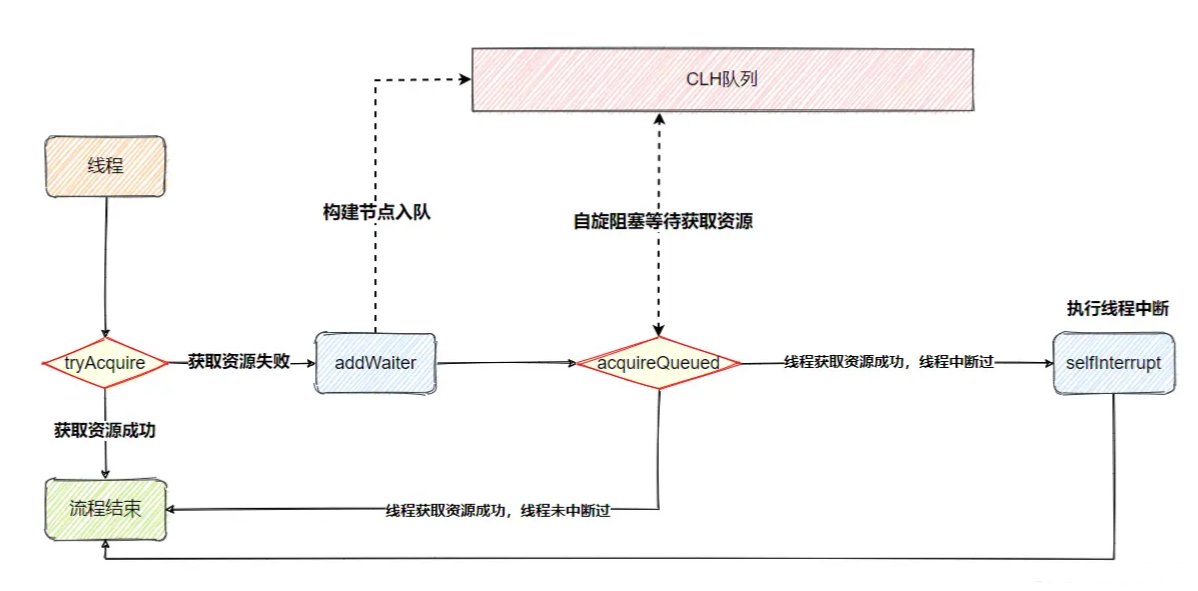
独占式获取资源
acquire模板函数,模板流程:
- 线程获取共享资源,如果获取资源成功,线程直接返回。
- 否则进入
CLH队列,直到获取资源成功为止,且整个过程忽略中断的影响。执行
tryAcquire函数,tryAcquire是由子类实现,代表获取资源是否成功。
- 如果资源获取失败,执行下面的逻辑。
执行
addWaiter函数,根据当前线程创建出独占式节点,并入队CLH队列。执行
acquireQueued函数,自旋阻塞等待获取资源。如果
acquireQueued函数中获取资源成功。
- 根据线程是否被中断状态,来决定执行线程中断逻辑。
1 | final boolean acquireQueued(final Node node, int arg) { |
独占式释放资源
AQS中提供了release模板函数来释放资源,模板流程就是线程释放资源成功。
- 唤醒
CLH队列的第二个线程节点(首节点的下个节点)。
1 | public final boolean release(int arg) { |
共享式获取资源
acquireShared模板流程就是线程获取共享资源,如果获取到资源,线程直接返回。
- 否则进入
CLH队列,直到获取到资源为止,且整个过程忽略中断的影响。
1 | public final void acquireShared(int arg) { |
共享式释放资源
AQS中提供了releaseShared模板函数来释放资源,模板流程就是线程释放资源成功。
- 唤醒CHL队列的第二个线程节点(首节点的下个节点)。
1 | public final boolean releaseShared(int arg) { |












{kind=link}